- 3D »
- Drones
Présentation du matériel
- Drone DJI Matrice 300 RTK ou Phantom 4 RTK
- Caméra nacelle DJI Zenmuse P1 avec objectif 35mm
- Abonnement N-RTK Téria
- Points de calage relevés avec un récepteur GNSS Trimble R12
- Logiciel Pix4D Maper
La DJI Zenmuse P1 est compatible avec 3 objectifs à focale fixe : 24mm, 35mm et 50mm.
La Zenmuse P1 ne peut être embarquée que sur un DJI Matrice 300 RTK. Ce drone propose une grande autonomie en vol de 43 minutes, permettant de balayer de 5 à 10 fois plus de surface par vol qu’un DJI Phantom 4 RTK par exemple. Son module RTK permet un géoréférencement des clichés avec une relative précision en temps réel. Le géomètre-expert ajuste cette précision à l’aide de relevés au sol.
Le DJI Matrice 300 RTK peut être équipé LiDAR permettant l’acquisition de données laser. Doté habituellement de 16 faisceaux ce capteur LiDAR peut acquérir jusqu’à 600 000 points à la seconde. Il intègre également une technologie double-écho qui permet de mesurer des points au sol même dans les zones de couvert-végétal. Le dispositif intègre également un dispositif de géoréférencement le rendant autonome.
Réalisation d'un plan de vol
Général
L’ensemble de la planification de mission est réalisé sous le logiciel Pix 4D Maper.
La zone de vol peut être délimitée directement sur un fond de carte satellite ou bien en important les coordonnées des sommets du périmètre.
Le logiciel crée ensuite automatiquement un plan de vol régulier respectant les spécificités de vol imposées (hauteur de vol, vitesse du drone, direction principale par rapport au nord, taux de recouvrement latéral et longitudinal, etc.).
Le plan de vol peut ensuite être affiné manuellement si besoin pour définir par exemple des hauteurs de transition entre le point de décollage et le début de mission. Le logiciel prévoit également le décollage, le retour du drone au-dessus de son point de décollage et l’atterrissage automatique du drone.
Le plan de vol peut ensuite être enregistré pour être réutilisé.
Spécificité pour un relevé photogrammétrique
Lors d’un relevé photogrammétrique en zone urbaine il est nécessaire de respecter certaines règles pour obtenir un résultat optimal.
Les taux de recouvrement doivent être suffisants pour reconstituer de manière précise la zone à étudier. Pour une zone urbaine afin d’éviter les occlusions et de pouvoir corriger les effets de dévers sur les bâtiments, il faut respecter un recouvrement minimum de 70% en latéral et de 80% en longitudinal. Ces contraintes associées à l’utilisation d’un DJI Matrice 300 RTK équipé d’un Alpha 6000 et d’un objectif de 24 à 50 mm correspondent à des axes de vol espacés de 30m à une hauteur de 70m.
Spécificité pour un relevé LiDAR
Lors d’un relevé lasergrammétrique il est nécessaire de respecter certaines règles pour obtenir un résultat optimal.
Les taux de recouvrement doivent être suffisants pour reconstituer de manière précise la zone à étudier. Il faut un recouvrement minimum de 30% en latéral. Cela correspond, pour un DJI Matrice 300 RTK équipé d’un LiDAR, à un passage environ tous les 60 m à une hauteur de 50 m.
Par ailleurs, le relevé Lidar nécessite une initialisation au début et à la fin du vol pour valider la donnée. Cela consiste en un aller-retour rapide sur une distance de 60 m minimum à une vitesse constante de 5m/s minimum.
Le relevé Lidar n’acquiert pas de donnée colorisée mais permet d’obtenir une très grande densité de points au m² ainsi qu’une rapidité de traitement.
Réglementation et sécurité
Les scénarii de vol
Les vols en drone sont soumis aux règles de l’aviation civile et en particulier au vol à vue.
Il en découle 4 types de scénario S1 à S4 :
Par exemple dans le cas S3, la règlementation oblige une déclaration en préfecture pour l’ensemble des vols réalisés en scénario urbain (S3). Cette déclaration décrit la zone à survoler, la date du vol, la durée potentielle de survol, le type de drone employé ainsi que les personnes responsables du pilotage. Cette déclaration en préfecture est à faire au minimum 5 jours ouvrables avant le vol. Par ailleurs dans le cas d’un vol au sein d’une zone surveillée par un aéroport, l’organisme de contrôle doit également être informé pour prendre les dispositions nécessaires à la bonne tenue du vol en toute sécurité.
Sécurisation de la zone de vol
Lors d’un vol en drone, une fois l’ensemble des déclarations réalisées et des autorisations reçues, une zone de sécurité doit être mise en place autour du télépilote et de la zone de décollage/atterrissage pour garantir la sécurité du télépilote ainsi que celle de la population environnante. Cette zone est matérialisée de l’installation du drone jusqu’à son atterrissage.
Par ailleurs, dans le cadre du scénario urbain (S3), tout drone non captif d’un poids supérieur à 2kg doit obligatoirement être équipé d’un dispositif limitant l’impact au sol (parachute).
Traitement des données (MNS, MNT et nuage de points)
Photogrammétrie
- Les images acquises durant la mission sont extraites de la carte SD de l’appareil photo.
- Les clichés sont ensuite géoréférencés issus des données mesurées par la carte GNSS (RTK).
- Les images, les paramètres internes de la caméra (cf. calibration) ainsi que le géoréférencement sont importés dans le logiciel de photogrammétrie, il s’en suit les étapes suivantes :
- Détection automatique de points d’intérêt sur les images.
- Appariement des points d’intérêt communs à plusieurs images.
- Calcul des orientations relatives entre chaque couple d’images.
- Marquage des cibles sur les images (cf. Recalage).
- Calcul des orientations absolues de chaque image.
À la suite de cette première étape, une densification est réalisée pour obtenir un nuage de points précis et détaillé de la zone.
Ce nuage de points densifié nous permet ensuite de générer le MNS (Modèle Numérique de Surface) de la zone étudiée. De même grâce à ce MNS nous réalisons le MNT (Modèle Numérique de Terrain) en supprimant les points qui ne correspondent pas au terrain naturel.
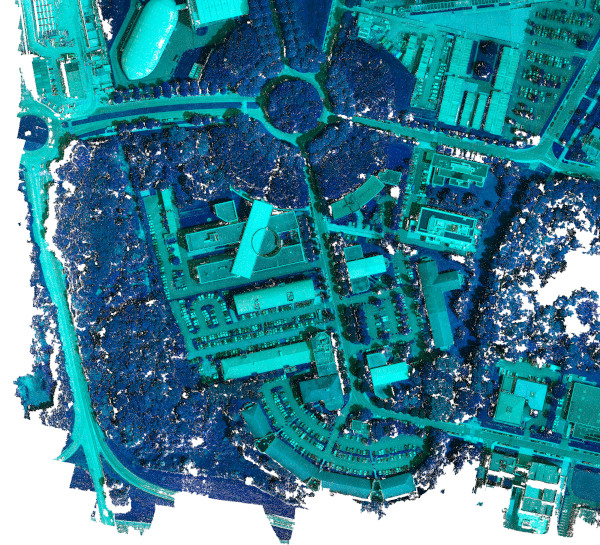
La troisième étape du traitement consiste en la réalisation de l’orthophotographie de la zone.
Le mosaïquage devrait présenter une résolution proche de celle des images acquise avec la configuration de vol présentée précédemment, à savoir un nombre de cm par pixel en fonction des demandes.
Au préalable de la phase de lever aérien, le cabinet Roseau réalisera un cheminement polygonal au tachéomètre. Le parcours envisagé mais non exhaustif est le suivant :
- Cheminement : des points de référence établis et matérialisés au sol par des clous métallique.
- Au cours de la phase de lever, les cibles photogrammétriques seront également disposées pour chaque zone de vol. Ces cibles seront relevées au récepteur GNSS pendant 3 minutes par le cabinet Roseau en plus de la polygonation et leur répartition sera homogène sur l’ensemble des zones à relever.
Pendant le traitement, le cabinet Roseau utilisera l’ensemble des points de référence et des cibles référencées pour calculer l’orientation absolue des clichés.
Deux points seront utilisés en contrôle pour chaque zone de vol. Le cabinet Roseau réalisera également un contrôle planimétrique supplémentaire à partir de lever d’arrêtes de bâtiments au laser du tachéomètre depuis les stations de la polygonation.
Lasergrammétrie
La chaîne de traitement
Les données LiDAR sont acquises avec le POD-LiDAR Lynx-16. L’ensemble des données est extrait via une clé USB de l’espace de stockage intégré au POD.
Dans un premier temps, la trajectoire précise du drone est calculée à partir des données de la carte GNSS/IMU Trimble APX15, à l’aide du logiciel POSPAC UAV. En parallèle les données LiDAR sont transformées au format CSV avec le logiciel VELOVIEW. Dans un second temps chacun des points acquis par le capteur LiDAR est géoréférencé à l’aide du logiciel Pix4D.
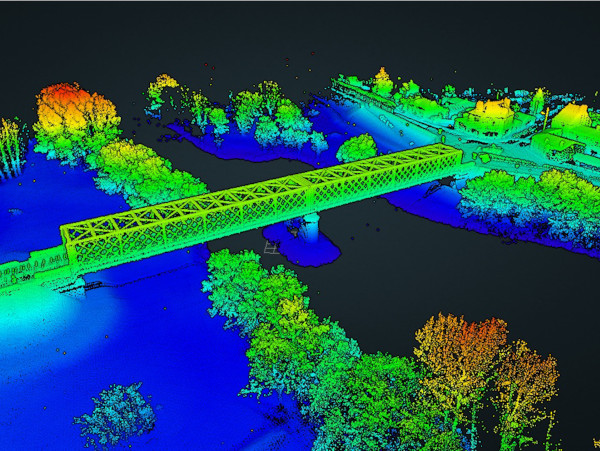
À l’issue du traitement, nous obtenons un nuage de points géoréférencés comme sur l’exemple ci-dessous.
Grâce à la technologie double-écho, il est possible d’isoler la végétation du reste des points et donc de la supprimer pour créer le MNT.
Exemple de nuage de points LiDAR géoréférencé:
Inspection / Vidéo / Photo (Drone)
Le cabinet Roseau est en mesure de réaliser vos inspections d’ouvrage et de vous fournir un reportage photographique et vidéographique. Nous nous adaptons à toutes vos demandes en fonction de votre cahier des charges afin d'optenir un rendu conforme à vos exigences les plus pointues.
Siège social : 9 rue Ernest Cresson 75014 Paris
Tél.: 01 48 87 23 11
Paris 3e • Paris 14e • Bussy-Saint-Georges 77 • Maisons-Alfort 94 • Vaugrigneuse 91
Dirigeants : M. Hubert Roseau n° OGE : 02877 et M. Sylvestre Roseau n° OGE : 06678
Le Cabinet Roseau et Associés est affilié à l'ordre des géomètres-experts sous le numéro n° 1989 B2 00017. Siège social : 18, Place Denfert-Rochereau 75014 Paris
